





ヒューマノイドロボットと餅つき!ブラックAIが大会で優勝
ブラックAIがヒューマノイドハッカソンで示した未来の協調技術
2026年5月30日と31日に、GMOヒューマノイドラボで開催された「HUMANOID HACK TOKYO」において、Black AI株式会社が栄光の優勝を手にしました。このハッカソンは、ヒューマノイドロボットを活用した開発を促進するイベントで、世界中から集まったエンジニアたちが競い合う場となりましたが、その中でBlack AIは、日本の伝統文化である餅つきをテーマにした「人機協調」のデモにて注目を浴びました。
餅つきを通じて示す人・ロボットの未来像
餅つきは、二人が息を合わせて行う、日本の伝統的な協調作業の一つです。このデモでは、参加者が杵を振り下ろし、もう一方が餅を返す作業を、人間とヒューマノイドロボットが連携して行いました。タイミングがわずかでもずれると事故につながるため、両者の高度な理解と信頼関係が求められるこの作業が、安全に実演されたことが高く評価されました。
技能の継承を目指すプロジェクト
日本は少子高齢化が進む中、職人技の継承が課題となっています。多くの伝統技術が失われつつある現状で、Black AIは単に人間を置き換えるのではなく、人間と共に働くロボットの可能性に注目しています。このプロジェクトは、熟練職人の動作を再現可能な形で残すことで、次世代へと技を繋いでいく未来を示唆しています。「技能継承」と「人機協調」を両立させる新たなアプローチがここにあります。
デモの実際と技術的なポイント
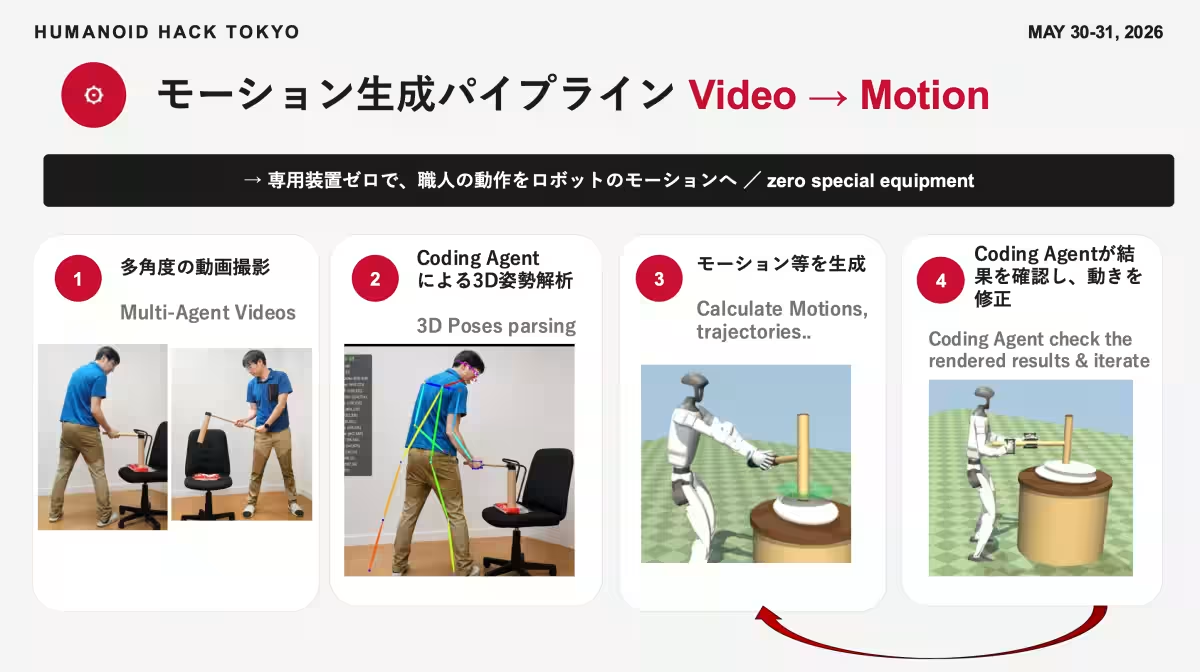
デモでは、ヒューマノイドロボットがカメラを使って人間の手の動きをリアルタイムに認識し、手が臼にある間は杵の動作を停止。手が離れるタイミングで杵を振り下ろすことで、安全な協調作業を実現しました。これは単なる自動化ではなく、人間の状態を理解し合う「協調」をテーマにしています。
餅つきは、独自の道具と技術を要するため、一般的なAI技術では再現が難しいとされてきました。この課題に対処するため、Black AIは動画から動作を生成する独自のワークフローを開発しました。熟練者の動作を解析し、ロボットのモーションを生成する一方、強化学習を活用して安定した動作を学習。これにより、さまざまな構えと安定した打撃を実現しました。
実施されたハッカソンの背景
「HUMANOID HACK TOKYO」は、2026年にオープンしたGMOヒューマノイドラボにて開催され、多くのロボットエンジニアやAI専門家が集い、リアルタイムな技術の交流が行われる場として注目されています。このハッカソンは、建設、製造、物流、農業業界に向けたロボット開発を推進するOrbohが主催しました。Black AIとしては、今回の受賞を契機に、さらに技術を社会実装することに乗り出し、ロボット技術の可能性を広げる考えです。
展望と今後の展開
Black AIは、今後もヒューマノイドロボットを活用した技術検証を加速させ、物流や製造、介護、伝統工芸など様々な分野への応用を視野に入れた開発を進めていきます。本プロジェクトが示すように、AI技術の発展は、私たちの社会や文化を支える新しい方法として大きな意義を持つものであると考えています。




トピックス(イベント)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。