





次世代ロボットハンドの実力を引き出す新プラットフォーム「All Hands Up!」
次世代ロボットハンドの実力を引き出す新プラットフォーム「All Hands Up!」
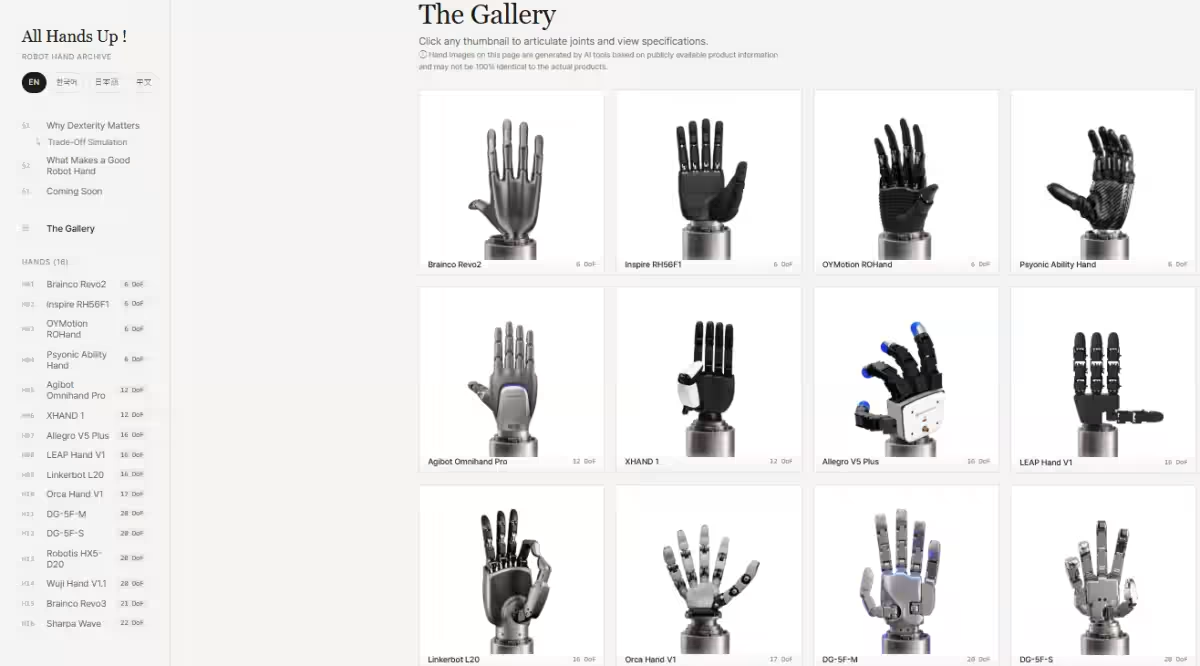
リアルワールド(RLWRLD)は、ロボティクスに関する新たな一歩を踏み出しました。彼らが最近公開したロボットハンド分析プラットフォーム「All Hands Up!」は、ロボット技術の進化を促進する重要な基盤となるものです。このプラットフォームは、実際の多関節ロボットハンド(Dexterous Robot Hand)の性能を分析し、設計上の限界やトレードオフを可視化しています。
「All Hands Up!」が目的とするもの
「All Hands Up!」は、メーカーごとのスペックシートだけでは捉えられないロボットハンドの実際の動作性能を示し、ユーザーが実運用の信頼性を高めるための有効な参考にすることを目的としています。これにより、研究や産業の現場での「どのロボットハンドが実環境で効果的に機能するか」という問いに対する答えを模索する手助けとなります。
ロボットハンド設計の限界
ロボットハンドはPhysical AI技術の中核を成す重要な要素ですが、各種性能の間には避けがたいトレードオフが存在しています。特に、サイズや把持力、逆駆動性(バックドライバビリティ)との関係性は、ロボットハンド設計におけるチャレンジとなっています。
サイズと把持力のトレードオフ
ロボットハンドのサイズを小型化すると、内部に組み込まれる駆動モーターも小さくなり、結果として把持力は弱まります。これは、特に狭いスペースでのロボットハンド利用時において、性能とサイズのバランスを取る必要があることを示しています。
把持力と逆駆動性のジレンマ
一方で、把持力を増加させるためにギア比を上げると、逆に逆駆動性が低下する可能性があります。これは、衝撃を和らげる特性を損なうリスクがあります。こうしたトレードオフを意識した設計が現在の市場状況を制約しています。
客観的評価を可能にする「DexBench」
リアルワールドは、ロボットハンドの性能をより厳密に評価するため、自社独自のベンチマーク「DexBench」を開発しました。このベンチマークでは、18種類の実世界タスクに基づいて、各ロボットハンドの性能と限界を定量的に分析しています。ここでは、親指の可動範囲や、指先関節の独立駆動の可否、最小把持可能径などが考慮されています。
2つの運用モデル
リアルワールドは、ロボットハンドの課題を解決するために、機能および用途に応じたハードウェアの二元化を提案しています。商業現場での実用性を重視した「Type 1」と、AI学習のための高精細なデータ収集が可能な「Type 2」に分かれます。それぞれが異なる目的のために最適化されており、相互補完的に活用されることを目指しています。
URDFベースの可視化機能
「All Hands Up!」では、URDF(ロボット記述の標準フォーマット)を使ったインタラクティブな可視化が提供されており、ユーザーはブラウザで動作確認をすることができます。これにより、専門的な知識がなくても、異なるロボットハンドの比較や動作検証が可能です。ユーザーは、各関節を操作しながら目的とする把持形状が実現できるかをチェックできます。
リアルワールドの代表、リュ・ジュンヒ氏は「『All Hands Up!』はロボットハンド技術の実運用データを全ての産業界と共有するオープンプラットフォームです。四半期ごとの更新を通じて、持続的な情報提供を行い、業界全体の発展に寄与したい」と述べています。バイオニクス業界の新たな道を切り開くこのプラットフォームは、多くの可能性を秘めています。
リアルワールド(RLWRLD)について
リアルワールドは、機械に人間レベルの動作能力を実装するロボティクスのリーディングカンパニーで、2024年に設立されました。米国、韓国、日本に拠点を持ち、産業環境におけるは高精度な4D+マルチモーダルデータの収集・学習に基づいた技術を提供しています。
公式ウェブサイト:https://www.rlwrld.ai/jp
特設サイト:www.allhandsup.org

関連リンク
サードペディア百科事典: ロボットハンド リアルワールド All Hands Up!
トピックス(その他)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。