




ロボットが環境を理解する時代が到来!新技術に注目
ロボットが環境を理解する時代が到来!新技術に注目
AIとロボティクス、そして画像認識の進化によって、次世代のロボット技術が形を成してきました。株式会社Forcesteed Robotics(以下、Forcesteed社)と川崎重工業株式会社(以下、川崎重工)はこのたび、移動型ロボットのための画期的なセマンティックマップ生成技術を共同開発し、実証試験を開始しました。この技術は単なる移動を超え、ロボットが環境の意味を理解しながら行動できる未来を切り開きます。
セマンティックマップ生成技術とは?
今回開発された技術は、従来のSLAM(自己位置推定と地図作成)技術を進化させたものです。従来のSLAMでは、ロボットは位置を特定し、幾何学的な地図を作成することが主な機能でした。しかし、これらの地図は「通路」や「障害物」といった構造情報に限られ、実際の環境の意味を捉えることができませんでした。そこで、Forcesteed社と川崎重工業は、AIと画像認識の技術を融合し、環境に「意味ラベル」を付与できるセマンティックマップを開発。それにより、ロボットが自律的に環境を理解しながら移動できるようになります。
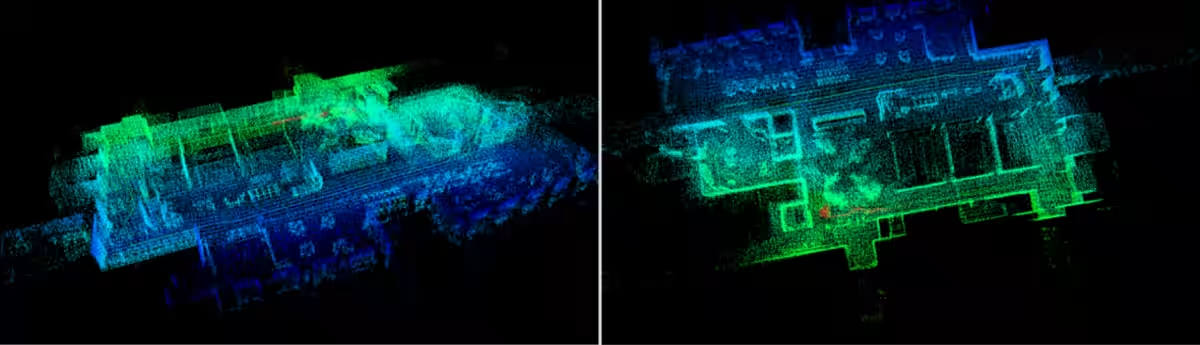
この技術では、カメラ映像とLiDARデータを活用して、環境内の様々な物体に意味を持たせることが可能です。例えば、「ドア」「棚」「通路」といったラベルを付与することで、特定のエリアを効率的に認識し、特定の場所へと目的をもって移動できるようになります。
技術の特徴
このセマンティックマップ生成技術の主な特徴は以下の通りです。
- - 自動ラベリング:カメラとLiDARを用いて、環境内の物体に自動的に意味ラベルを付ける。
- - 柔軟な移動計画:意味検索機能を活用し、ロボットが特定の目的地(例:「会議室を探して行く」)に向かうことができる。
- - 適応力の向上:動的な環境でも地図の準備が簡素化され、移動がスムーズになる。
実際に屋内走行実験を行ったところ、80%以上のラベル認識精度を達成しましたが、計算負荷や暗い場所でのカメラ性能、ラベルの汎用性など、さらなる改良が求められています。
社会実装に向けた展望
Forcesteed社と川崎重工業は、今後この技術を屋内作業や点検、警備ロボットなどの分野に応用していく予定です。2027年を目標に、これまでの地図依存型ナビゲーションを脱却し、ロボットが環境の意味を理解して行動できる「マップレスなロボット」を実現することを目指します。
将来的には、ロボットが社会の一員として自然に溶け込み、人とのコミュニケーションを持ちながら活動できる「融和型ロボット」の実現を目指して、両社は実証試験を続けていく考えです。
KAWARUBAについて
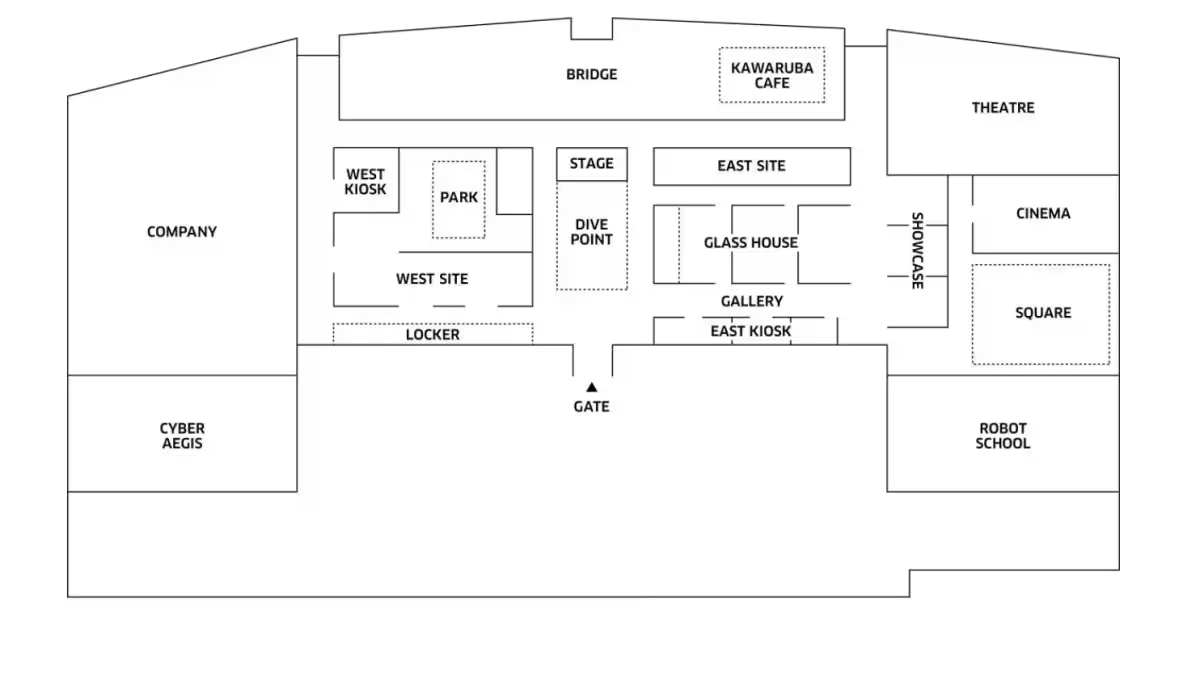
この技術は川崎重工業が開設したソーシャルイノベーション共創拠点「KAWARUBA」(カワルバ)で実証試験が行われています。KAWARUBAは、社会課題解決に向けた新たな価値創出を生むためのオープンイノベーションの場です。多様なスタートアップや研究機関と連携し、次世代技術の開発と実証試験が行われています。2024年には「Haneda Innovation City」も開設され、さらに充実した環境が提供される予定です。
この新技術の進展は、私たちの生活にどのように影響を及ぼすのか。これからのロボットの進化に期待が高まります。




関連リンク
サードペディア百科事典: ロボット技術 川崎重工業 Forcesteed Robotics
トピックス(エンタメ)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。