




ポケット・クエリーズと建築研究所が手掛ける無人調査システムの先進性
ポケット・クエリーズと建築研究所による革新的な調査システム
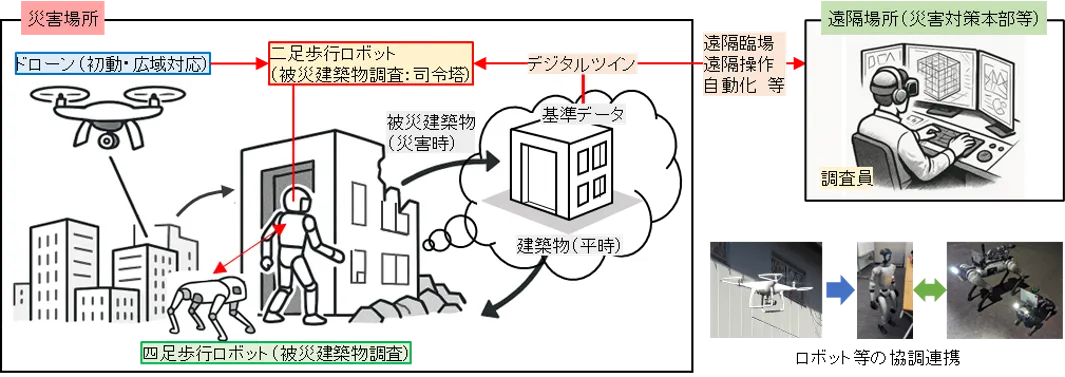
株式会社ポケット・クエリーズと国立研究開発法人建築研究所は、共同で無人による被災建物調査のシステム開発に取り組んでいます。このプロジェクトは、自然災害の激甚化に伴い、調査業務を効率化し、安全に行うことを目的としています。日本政府が重点投資分野とする「防災」や「国土強靭化」に基づくこの研究は、新たな技術の活用を通じて、課題に立ち向かうものです。
プロジェクトの背景と目的
日本では、自然災害に対する迅速かつ効率的な調査が必要不可欠です。昨今の災害により、現場で調査を行う専門技術者が不足する中、ポケット・クエリーズと建築研究所は、これまでの共同研究を基盤に、新たなロボット技術の導入に踏み切りました。このプロジェクトでは、ヒューマノイドと四足歩行ロボットの協調制御を通じて、無人化システムの実現を目指しています。
取り組み内容の詳解
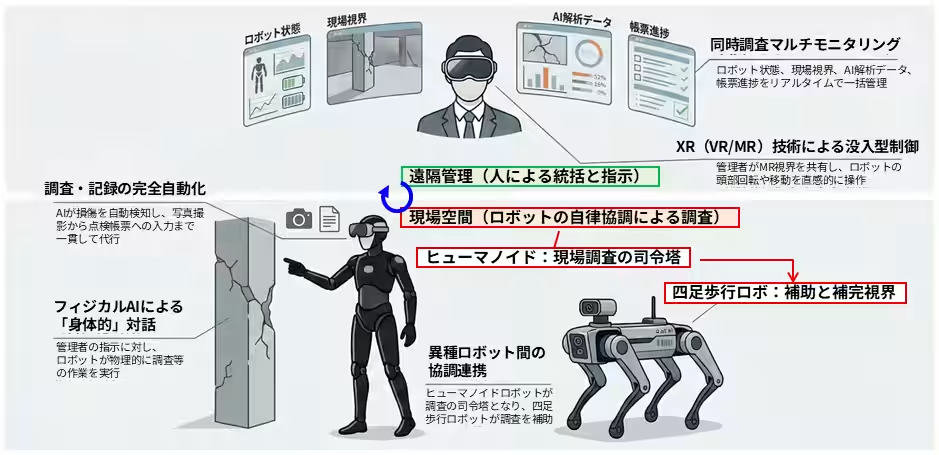
本共同研究では、異なる種類のロボットを使用し、遠隔操作による調査を自動化するシステムを開発しています。このシステムの特徴は、直感的な操作に加え、VR技術を取り入れることで、実際の現場状況をリアルに再現し、操作を行いやすくしています。
システムの特長
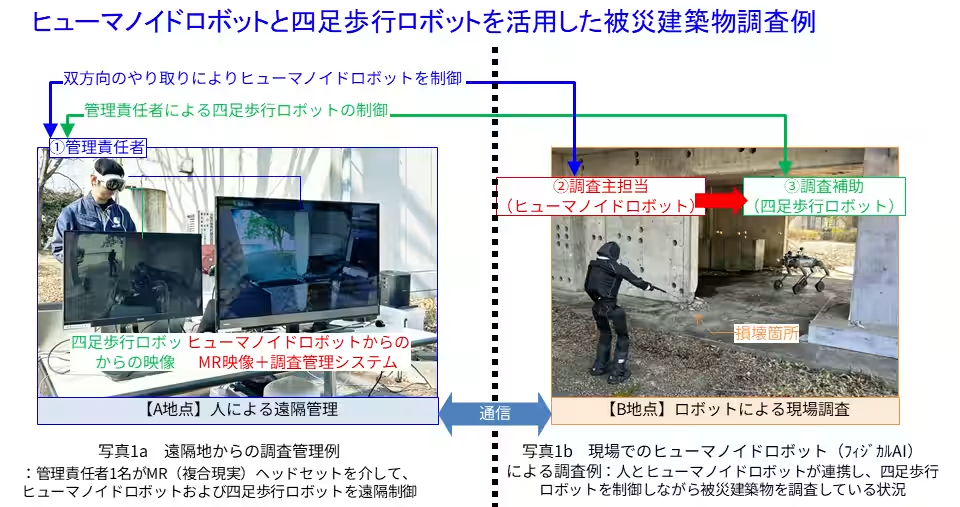
1. 直感的な遠隔操作: ヒューマノイドロボットがレーザー距離計を用いた調査を行う際、XR技術を使って、オペレーターはリアルタイムで状況を把握できます。また、ロボットが異常を発見した際には、指をさすなどの身体的対話を通じてオペレーターに通知が行われます。
2. 異機種ロボットの協調作動: ドローンによる空間把握と、四足歩行ロボットによる困難な地形の移動を統合することで、現場の正確な状況把握を行います。
3. 調査プロセスの完全自動化: AIを活用して、損傷検知から記録までのプロセスを自動化します。オペレーターは指示を出すだけで、ロボットが必要なデータを収集し、記録します。
実証実験の進行と結果
共同研究では、実際の環境での実証実験を行うことで、技術の実用性が確認されています。第1段階では、ロボットの基本動作や通信のテストを行い、第2段階では、模擬損傷を使って実際の被災状況を想定した調査を行いました。これにより、ヒューマノイドと四足歩行ロボット間の協調性が高められることが確認されました。
今後の展望
実証実験から得られたデータをもとに、さらなる改良が進められています。センサチューニングや通信環境の安定化が今後の焦点となり、実務での運用に向けたさらなる進展が期待されます。ポケット・クエリーズの共同研究は、被災地での作業をより安全で迅速なものに変える可能性を秘めているのです。これにより、専門技術者不足という課題の解消にも寄与することが望まれています。
このような先進的な取り組みは、まさに未来の都市・建築を形作るための重要なステップとなることでしょう。
トピックス(その他)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。