





自律運用を実現した変形型月面ロボットSORA-Qの成果と可能性
自律運用を実現した変形型月面ロボットSORA-Qの成果と可能性
2026年6月10日、変形型月面ロボット「Lunar Excursion Vehicle 2(LEV-2)」、通称「SORA-Q」は、国際学術誌「Science Robotics」において論文が掲載され、表紙を飾るという栄誉を獲得しました。この論文は、日本の宇宙探査における技術的な革新を示す重要な成果をまとめています。
変形型月面ロボットの概要
LEV-2は直径約8cmの球体から変形し、ローバとして月面を自律的に探査する能力を持っています。この研究では、地上からの遠隔操作に頼ることなく、自ら判断しながら移動、撮影、通信を行う技術が中心に論じられています。自律運用の結果として新たに得られた月面画像が公開され、SORA-Qの実用性と将来性が証明されています。
宇宙探査の背景と課題
これまでの月や火星探査は、大型で高機能なローバによるものでしたが、それには高額なコストや開発期間が伴いました。それに対し、SORA-Qのような超小型ロボットは低コストで投入可能ですが、通常は移動能力や処理能力に制約があります。月面という柔らかい地面では、特殊な設計が必要です。また、通信が不安定なため、自立的に判断して行動する能力が求められます。
成果の詳細
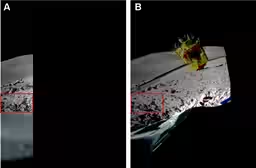
本研究の成果は以下となります。特に、LEV-2は月面での週展開から自発的に移動し、周囲の環境を撮影する目的で、自律的に動作することができました。運用中に取得した二つの月面画像を元に、実際にLV-2が約0.13mを移動し、180度旋回していることが確認されました。
完全自律の探査実証
LEV-2は、着陸後直ちに起動し、月面探査を開始しました。周囲の環境に応じて重要な画像を選び出し、通信しながら自律的に行動。これにより、従来の手動操作に依存せず、安定したデータ取得が可能となりました。最新の画像も公開され、これまでの探査方法の限界を突破したことがはっきりと示されています。
移動能力の革新
SORA-Qの特長である変形機構と偏心車輪を用いた移動機能が効果的に機能したことも確認されました。月面環境での適応性を示す重要な証拠が得られ、超小型ロボットとしての実用性が実証されています。
実環境データの収集
月面探査の過程で、通信の途切れやデータ欠損といった課題も顕在化しました。しかし、LEV-2の異常検知機能や自己回復機能が実際に機能し、自律的に対応したことが確認され、今後の設計指針や運用方法の改善に役立つ具体的な知見が得られました。
今後の展望
今回の成果を受け、小型ロボットによる探査の可能性が広がります。将来的には、複数の小型ロボットを連携させて広範囲を効率的に探査する技術の開発が期待され、宇宙探査の加速が実現されるでしょう。これにより、月面や火星、さらには洞窟や急傾斜地における探査の拡張が見込まれています。
最後に
変形型月面ロボット「SORA-Q」の開発は、JAXA、タカラトミー、ソニー、同志社大学の共同作業による成果です。この技術は、将来の宇宙探査活動における重要な進展を象徴し、我々の宇宙活動の域を広げていくことでしょう。


トピックス(エンタメ)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。