





新時代のロボティクスを担うRLDX-1の全貌とその可能性
はじめに
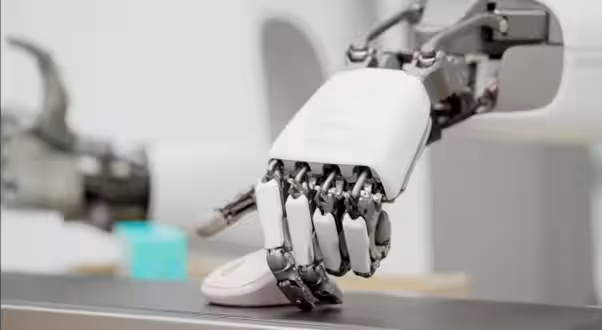
リアルワールド株式会社(RLWRLD)が2026年5月7日に発表した「RLDX-1(リアルデックス)」は、日本初の独自ロボティクス基盤モデルとして注目を集めています。視覚や言語に加え、力や触覚、記憶の処理が可能なこのモデルは、「Dexterity-First」設計を採用し、従来の視覚・言語中心のモデルとは異なるアプローチで高い性能を実現しました。本記事では、RLDX-1の特徴や技術的背景、今後の展望について詳しく解説します。
「Dexterity-First」とは何か?
従来のロボティクスでは、「知能が先に実現すれば、器用さは自然と備わる」という考え方が一般的でした。しかし、RLDX-1はこの考え方に挑戦し、器用さを知能の結果ではなく、知能が物理的に行動する上で不可欠なプロセスとして捉えています。この革新的な視点は、力や触覚、接触タイミングといった視覚だけでは捉えられない情報の扱いに重点を置くもので、産業現場における精密な作業の自動化に向けた新たな道を示しています。
リアルワールドはこの考えを実証するために、自社ベンチマーク「DexBench」を通じて、産業現場での手作業の課題を体系的に定義しました。具体的には、把持の多様性、空間精度、時間精度、接触精度、文脈認識の5つの観点から手の操作能力を評価する仕組みを整備しています。
高性能を実証したグローバルベンチマーク
RLDX-1は、NVIDIA社のGR00TやPhysical Intelligence社のπO(パイゼロ)といった既存の最高性能モデルを上回る結果を示しました。特に、長期間かつ接触中心のタスクであるRoboCasa Kitchenでは70.6点を記録し、その成果が高く評価されています。また、「GR-1 Tabletop」モデルにおいても58.7点を獲得し、他のモデルとの差を大きく広げています。
さらに、実機環境での評価においても、リアルワールドが開発に関与したWiRobotics社のヒューマノイド「ALLEX」を用いることで、70.8%の成功率を達成。これに対し、競合他社のモデルは約30%台に留まっており、約2倍の成果を実現しています。この結果は、RLDX-1の技術が実際の作業現場でも有効であることを示しています。
コアアーキテクチャ「MSAT」の革新
RLDX-1の技術の根幹を成すのは、マルチストリーム・アクション・トランスフォーマー(MSAT)です。従来のVLAモデルが様々な信号を単一ストリームで処理していたのに対し、MSATは各モダリティを独立したストリームで扱います。このアーキテクチャは、信号間の相互作用を考慮しながら、力や触覚といった物理信号の処理を行うことで、ロボットの動作への理解を深めています。
リアルワールドのCTOであるペ・ジェギョン氏は、「各モダリティがそれぞれの特性を十分に発揮できるよう構造を分離した点が、RLDX-1の中核です」と説明しています。この独自の設計が、ロボットが物理的な世界での行動においてより効果的な判断を可能にします。
産業における実用性を追求
RLDX-1は開発の初期段階から、産業現場で要求される作業を高い精度で遂行できるよう設計されています。リアルワールドは、数十社にのぼる産業パートナーと協力し、製造や物流の現場を直接観察し、その知見をRLDX-1に反映させました。このプロセスを通じて、現場ニーズを起点とした手作業タスクを定量化した評価体系「DexBench」を制定し、今後はデクステリティ分野における産業標準の確立を目指しています。
未来持つ4D+ワールドモデル
RLDX-1は、次世代技術ビジョンである「4D+ワールドモデル」へとつながる重要な第一歩と位置付けられています。同社は、視覚や言語だけでは捉えられない物理的な接触やトルクといった情報を新たに取り入れ、時間軸上で統合的に予測・生成していく予定です。これにより、産業現場で必要とされる精密作業に対応するための新たなアプローチを模索しています。
結論
リアルワールド(RLWRLD)のRLDX-1は、ロボティクスの分野において新しい視点を提供し、産業現場における実用性を高める可能性を秘めています。今後の技術革新と新たな展開が期待され、リアルワールドは日韓の産業界においてRLDX-1の導入を進めながら、グローバルなAIインフラパートナーと連携してアルゴリズムのさらなる向上を目指しています。未来のロボティクスは、RLDX-1によって新たな次元へと進化を遂げることでしょう。




トピックス(エンタメ)








【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。