
四足歩行ロボットによるトンネル工事の安全性向上を実現




四足歩行ロボットによるトンネル工事の安全性向上
株式会社鴻池組と株式会社ポケット・クエリーズは、山岳トンネル工事における安全対策を強化するため、四足歩行ロボットを活用した新しい観察システムの実証実験を実施しました。これは、トンネル工事に伴う危険な環境で作業員の安全を確保することを目的とした取り組みです。
危険なトンネル工事
山岳トンネルの建設は、必然的に危険を伴います。特に掘削面の観察作業では、落石や崩落、さらには可燃性ガスの存在など、さまざまな危険が考えられます。このため、作業員が直接危険な場所に赴くことなく、安全に情報を収集する手段が求められてきました。
四足歩行ロボットの導入
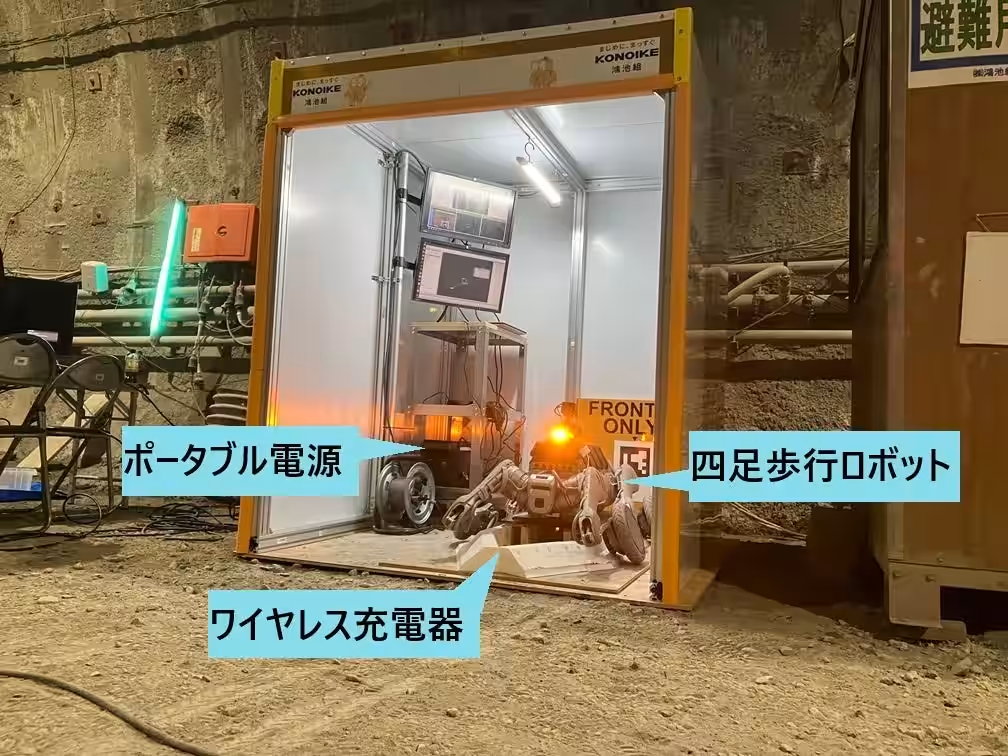
実証実験では、Unitree社製の四足歩行ロボットB2-Wを使用し、周辺環境をスキャニングして自律的に観察を行うことができるよう設計されています。ロボットは発進基地から約60mの地点に送り出され、以下のプロセスを経て観察を行います。
1. 発進基地からスタート地点に移動し、周囲の環境をスキャンします。
2. 取得したデータを元に、自律歩行を開始し、障害物を避けながら掘削面へ向かいます。
3. 目的の地点に到達後、自動で停止し、環境データを取得します。
4. 観察を終えたロボットは、同じ経路を辿って発進基地に帰還し、充電を行います。
このように、ロボットが自身で周囲の状況を把握し、危険を回避しながら進むことで、作業の精度と安全性を両立しています。
各種搭載機器の機能
実証実験で使われたロボットは、以下の機器を搭載しています。
- - 3DLiDAR: 空間認識と障害物検知用
- - ガスセンサー: CH4、O2、H2S、CO、CO2などの濃度を測定
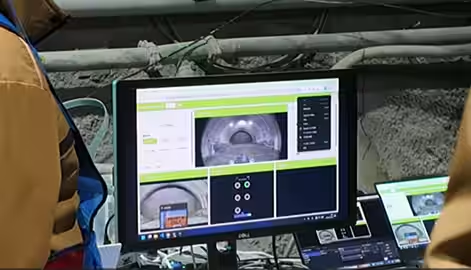
- - 撮影システム: 高精度撮影のためのジンバルカメラと遠隔操作用のPOVカメラ
- - 制御PC: 各種センサーデータの統合処理
- - 通信モジュール: 遠隔操作と監視用の通信機能
実験結果と今後の展望
実験では、ロボットが特定の地点で掘削面の観察を行い、風化状況や湧水、ガスの存在を確認しました。このプロセスにより、従来の目視による作業と同等の精度を保持しながら、作業員の安全を確保することができました。
今後は、さらなるリスクを考慮し、複雑な地形における運用や長時間の観察を可能にするための研究が進められます。鴻池組とポケット・クエリーズは、この先進的な取り組みを通じて、山岳トンネル工事の安全性と効率性を向上させることを目指しています。


トピックス(その他)


【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。