





四足歩行ロボットによる下水道管の遠隔調査実証実験が成功
四足歩行ロボットによるインフラ点検の新時代
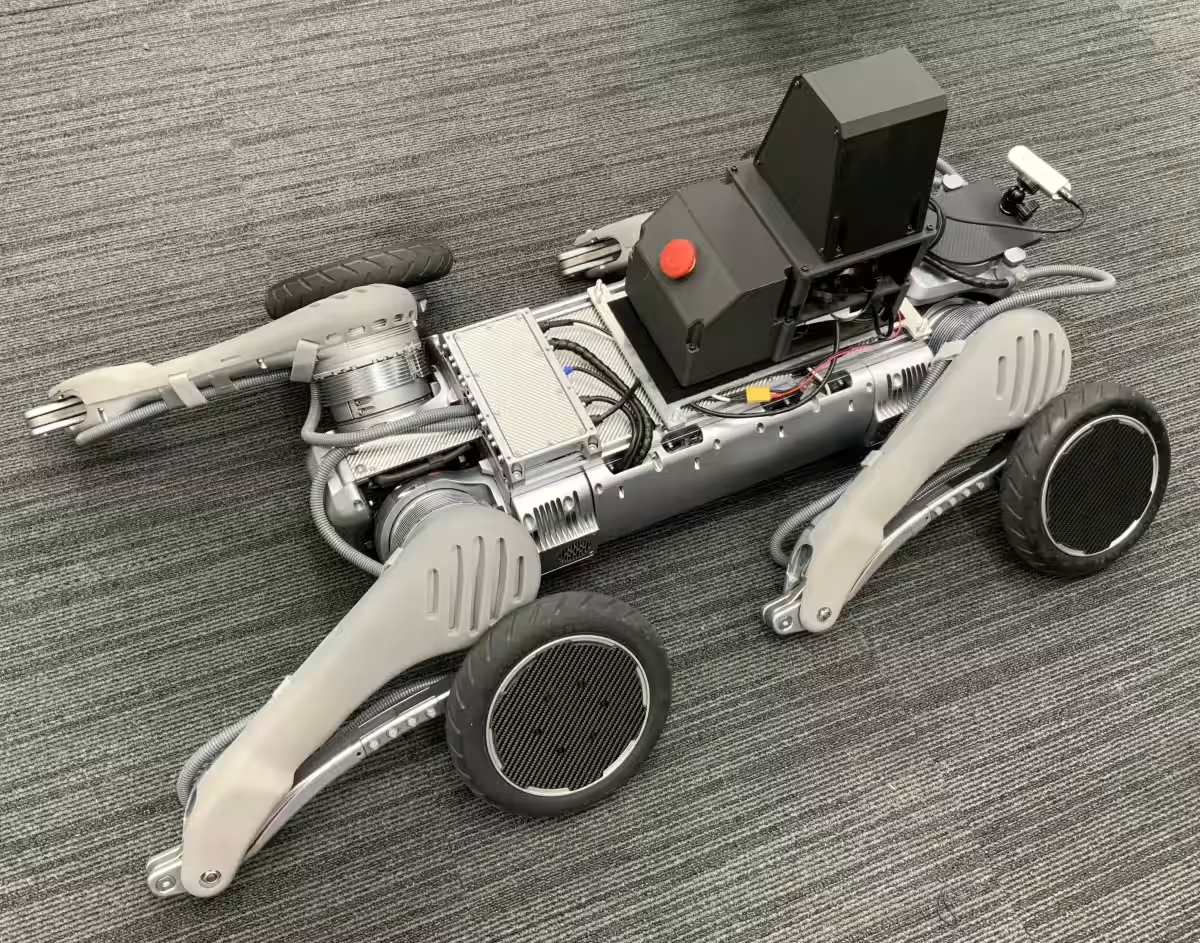
2025年4月28日、東京都新宿区に本拠を置く株式会社ポケット・クエリーズと愛知県安城市のサン・シールド株式会社が共同で、最新技術を駆使した実証実験を実施しました。この実験では、四足歩行ロボット「Go2-W」を用いて、愛知県瀬戸市の雨水排水管渠工事現場で下水道管の内部点検を行い、地上からの無線遠隔操縦による操作と映像取得に成功しました。
実験の背景
現在、インフラの老朽化が社会問題となっており、特に地下に埋設された下水道管などの点検作業は非常に危険な環境下で行われることが多く、作業員の安全が懸念されています。このプロジェクトは、そうした危険を回避し、効率的な点検を実現するための取り組みの一環なのです。
実証実験の詳細
実証実験は、内径1,100mmの下水道管内において、ロボットを約140m移動させ、内部状況の映像を取得することを目的としました。特に、換気や防毒マスクの装着、ガス測定が必要な狭小断面の環境下で、実施されたことに意義があります。
遠隔操縦の様子
地上拠点からの安定した無線通信を介して行われたこの実験では、Wi-Fi Access Pointを1台のみ設置し、立坑深7mの距離でも問題なく操作可能であることが確認されました。これにより、現在の技術では難しい現場での安定した遠隔操縦が実現したのです。
ロボットの性能評価
ロボット「Go2-W」は、不整地や湾曲のある管路でも高い安定性を保ち、効率的に走行が可能であることが証明されました。特に、自律性が高いことが大きな特徴で、ほとんど手動操作を必要とせずに自然な姿勢を維持することができました。
制御システム「iVoRi Box」
ポケット・クエリーズが開発した「iVoRi Box」は、四足歩行ロボットの制御に特化したシステムです。4K・PTZカメラおよびLiDARを搭載し、高度な自律走行やリアルタイム映像取得を行うことができます。このシステムにより、現場作業の効率化とデジタルトランスフォーメーション(DX)が進められています。
今後の展望
今後、ポケット・クエリーズは無線操縦のさらなる安定性向上や防水・耐熱性能の強化、AIによる異常検知システムの導入など、技術の実用化を目指して研究を進めていく予定です。これにより、より難易度の高い現場でも安全に点検が行えるようになるでしょう。
まとめ
ポケット・クエリーズは、技能継承や省力化をテーマにした現場向けDXツールを開発しつづけており、生成AI技術を活用した実用的な検証によって、より高度なインフラ管理が可能になることを目指しています。今後の技術進化に期待が寄せられます。


関連リンク
サードペディア百科事典: インフラ点検 四足歩行ロボット ポケット・クエリーズ
トピックス(その他)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。