




透明物体を自在に操る!新技術でロボットアームの課題を乗り越える
透明物体を自在に操る!新技術でロボットアームの課題を乗り越える
東京理科大学の創域理工学部の研究チームが、多くの産業に革命をもたらす新しいロボットアームの把持技術を開発しました。この技術は、透明な容器や光沢のある包装材といった、これまでロボットが捉えにくいとされていた物体を高い精度で扱えるという特長を持っています。これにより、生産現場の自動化が促進され、作業時間の短縮と生産性の向上が期待されています。
技術の要点
この研究の核心は、RGB画像とセマンティックセグメンテーションによって物体を正確に認識し、Shape from Silhouetteという手法で形状を復元することにあります。従来の3次元計測では、透明な物体や光沢のある物体の特性により深度センサが不安定になり、ロボットアームの自動把持が困難な状態でした。しかし、本研究では、1台のカメラから形状を推定し、必要な情報を効率的かつ正確に収集する新手法を採用しました。
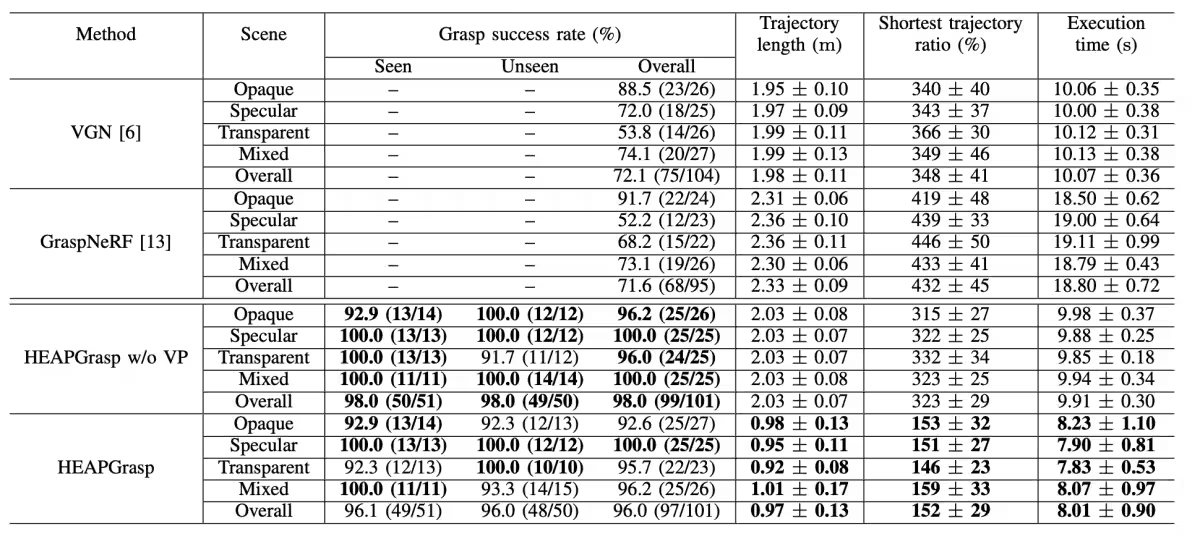
加えて、撮影位置と移動経路の自動最適化を行うことにより、形状推定の精度を保ちながら、撮影の速度を落とさない工夫がされています。この技術は実機によって証明されており、把持成功率は96.0%に達し、従来法に比べてカメラの移動距離を52%、ハンドリング全体の実行時間を19%短縮することに成功しました。
検証と成果
実際のロボットアームで試験を行った結果、被験物体は透明・光沢・不透明に分かれ、それぞれの把持成功率は危ぶまれましたが、本研究の手法では全てのカテゴリーで92.6%以上を達成しました。また、学習に使用していない物体に対しても、それぞれ98.0%と96.0%という高い把持成功率を記録。これは、技術の汎用性を示す大きな成果です。
この結果は、製造現場において自動化の進行を助けることが期待され、特に人手を必要とする分野での生産性向上に寄与することが見込まれます。
研究の背景
工場や生産現場では、部品や商品を正確に把持し、移動させることが求められていますが、透明物や光沢物体の把持が困難であることが大きな課題となっていました。この研究は、RGB画像やセマンティックセグメンテーションを用いてその課題を解決し、時間効率と精度の両立を目指してきました。
今後の展望
この技術がさらに発展すれば、製造や物流の現場におけるロボットの利用範囲が大きく広がることになります。荒井准教授は、「ロボットは人間の作業を補完し、生産性の向上に貢献する可能性があり、今後はその実用化を進めていきたい」と語っています。
本研究成果は、2026年1月12日に国際的な学術誌『IEEE ROBOTICS AND AUTOMATION LETTERS』に掲載され、さらに2026年にはロボティクス分野の重要なカンファレンスで発表される予定です。これにより、世界各国の研究者や実務者からの関心を集めています。
ロボットアームによる新たな技術は、実に多くの業界に影響を与えることが期待され、透明物体や光沢物体を扱えるその柔軟性と高精度な能力は、未来の生産現場を革新する鍵となるでしょう。

トピックス(グルメ)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。