



自律走行ロボットの新技術、IR-UWBで手軽に自立運行を実現!
自律走行ロボットの新たな技術
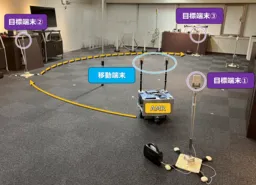
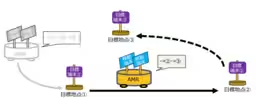
国立研究開発法人である情報通信研究機構(NICT)と株式会社テクノ菱和が、インパルス型超広帯域無線(IR-UWB)を活用した自律走行ロボット(AMR)の新しいシステムを開発しました。このシステムは、事前に地図を作成する手間なく、ポータブルなIR-UWB端末を目標地点とAMRに設置するだけで連続自動走行が可能になります。
高精度な距離計測技術
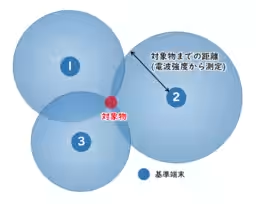
IR-UWBは高精度な距離計測に優れており、この特性を活かしてAMRがリアルタイムで距離を測定します。これにより、従来の自律走行方式では必要だった事前の座標標定作業や地図作成が不要となり、目標地点を設定する手間が省けるのです。
この技術の実用化により、特にクリーンルームなどの精密環境において作業の省力化が期待されており、作業時間の柔軟性も高まります。具体的には、低発塵環境での測定業務が可能となるため、精密な清浄度の測定が実現します。
クリーンルームでの作業効率の向上
クリーンルーム内では、人間が微粒子を発生させるため、多人数での測定が難しいという課題があります。そこで、IR-UWBを用いた自律走行ロボットが非常に有効です。この新システムを用いれば、測定を行うために目標端末を設置するだけで、自動的に測定を行うことができるのです。
この自動測定の導入により、測定作業を休憩時間や夜間に設定でき、日中は別の作業を行うことが可能になります。さらに、ロボットによる測定は、人間よりも発塵量が少ないため、より正確な清浄度測定が実現し、作業の効率化にもつながります。
将来の展望と応用
開発されたIR-UWBを用いた自律走行システムは、目標地点推定部とAMR駆動制御部が独立して情報を交換しながらそれぞれの制御を行う仕組みです。将来的には、これらの制御を統合し、システムをさらに小型化することで、より効率的な運用が期待されます。
このシステムは、計測や物流、建築分野における自動作業ロボットの自律作業支援など、さまざまな分野での応用が見込まれています。さらに、開発したシステムは、2025年6月20日と21日に開催される『NICTオープンハウス2025』にも出展予定です。
まとめ
新たに開発された自律走行ロボットのIR-UWBシステムは、クリーンルームや精密作業における効率化、柔軟性をもたらします。今後の展開が非常に楽しみです。技術の進化により、私たちの作業環境がどのように変わっていくのか、注目したいですね。

トピックス(その他)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。