



サービスロボットの未来を切り拓く、リンク式サスペンションの実力とは
サービスロボットの未来を切り拓く、リンク式サスペンションの実力とは
日本精工株式会社(NSK)は、サービスロボット向けプラットフォームの革新を進めています。このプロジェクトの中核を成す「リンク式サスペンション」は、整備の行き届かない屋外の環境でも安定した走行を実現する技術として注目されています。本稿では、このサスペンション技術の検証と今後の展開に迫ります。
1. 背景
国内外を問わず、サービス業では人手不足が深刻な問題となっており、その解決策の一つとしてサービスロボットの導入が求められています。特に、教育機関や飲食業、宿泊施設、物流分野では、屋外で使えるロボットのニーズが高まっています。しかしながら、悪条件の路面において安定した運行を確保することは技術的な難しさを伴っていました。NSKはこの課題に取り組みながら、2023年からサービスロボットプラットフォームの開発を加速させています。
2. 開発の経緯
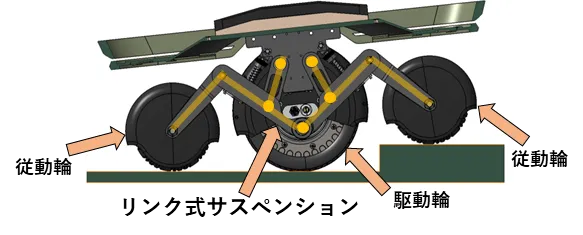
NSKは「MTP2026」という中期経営計画のもと、ベアリング事業で培った技術を活かし、929年には新たな事業領域に挑む姿勢を示しています。そして、2023年に発表したプロトタイプを基に開発したリンク式サスペンションが、屋外環境での性能を飛躍的に向上させる要素となりました。このサスペンションは、パンタグラフ形状の機構により、駆動輪と従動輪をしっかりと接続。他のロボットが苦手とする凹凸のある路面でも確実に接地し、安定した走行を可能にしています。
3. 今後の展望
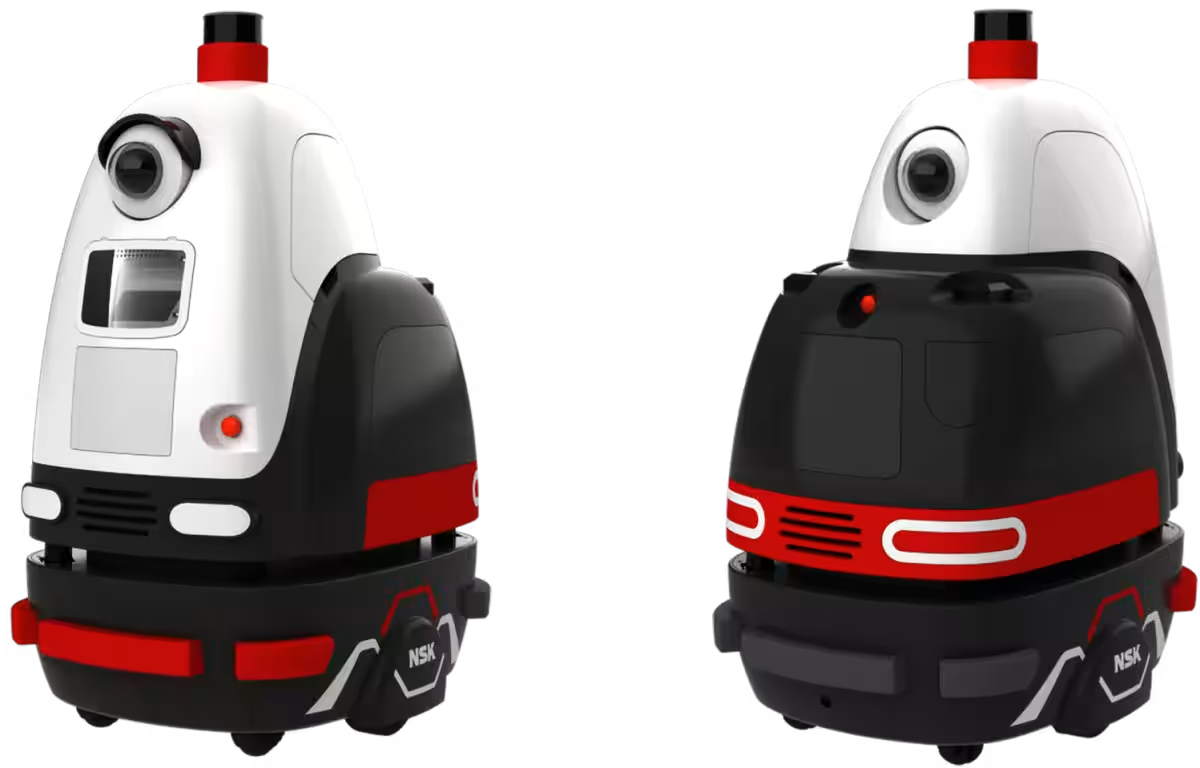
NSKはリンク式サスペンションを搭載することで、サービスロボットの低床化や小型化を実現する予定です。これにより、様々なユースケースに対応可能なロボットが市場に登場することが期待されています。2027年には本プラットフォームを市場に投入する計画で、実証実験を通じて機能の向上を図ることが目標です。
4. 実証プロジェクトの進展
特に注目すべきは、立命館大学との連携による屋外警備ロボットの実証プロジェクトです。このプロジェクトは、大学キャンパスという特定環境の中で、警備ロボットが実際に使用されることを目的としています。ここでは、NSK開発のリンク式サスペンションを装備したロボットが、段差や点字ブロックに対しても安定した走行を実現しています。また、AI画像解析技術を駆使した不審者検知や、GNSSを用いた精密な位置管理など、先進的な機能も搭載されています。
まとめ
NSKのリンク式サスペンションは、安定した走行性能を発揮し、サービスロボット市場に革命をもたらす可能性を秘めています。今後の実証実験を通じて、現場でのニーズに即した機能の追加されることで、技術がさらに磨かれていくでしょう。この取り組みが、未来のサービスロボットの姿をどう変えていくのか、期待が高まります。







トピックス(その他)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。