




無償公開された双腕ロボットAIデータセットが開発を加速!
双腕ロボットAIの新しい一歩
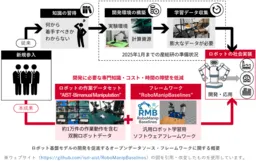
最近、国立研究開発法人 産業技術総合研究所(産総研)が、双腕ロボットAI開発を支援するための大規模データセット「AIST-Bimanual Manipulation」を無償で公開しました。このデータセットは、約1万件の作業シーケンスを含んでおり、企業や研究機関がロボット開発を短期間に始める手助けとなります。
開発の背景と必要性
日本は少子高齢化が進み、人手不足の問題が深刻化しています。特に製造業や物流、介護現場では、人間が担ってきた複雑な作業をロボットに代替させることが急務です。しかし、両手を使った協調作業が求められるため、従来のロボット開発には多くの学習データや高度な技術が必要でした。
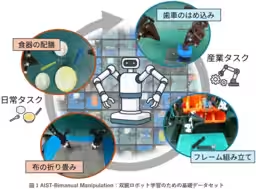
例えば、組み立て作業では片方の手で物を固定しながら、もう一方の手でネジを締めるというような動作が要求されます。これに加えて、物流では箱を持ち上げつつ配置を調整する、家庭では洗濯物を広げたり畳んだりするなど、人間にとってはごく日常的な作業でもロボットには大きな課題となっています。
AIST-Bimanual Manipulationとは
「AIST-Bimanual Manipulation」データセットは、特に日常生活及び産業現場での動作を想定し、人間のように両手を使った器用な作業を行うための基礎データを提供します。このデータセットには、片方の手で物を保持しつつ、もう片方で細かい作業を実施するシーンが多数含まれており、ロボットが人間のような協調動作を学習できるよう設計されています。
データ収集には、リーダーフォロワー型遠隔操作システム「ALOHA」が使用され、熟練した操作者による動きがリアルタイムで記録されます。このような高度なデータをもとに、実際に双腕ロボットが複雑な動作を理解し、実行できるか検証されています。
RoboManipBaselinesとの連携
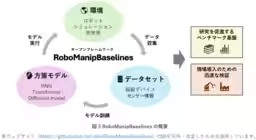
今回公開されたデータセットは、すでに無償で提供されているソフトウエアフレームワーク「RoboManipBaselines」と連携しており、開発環境の構築がしやすくなっています。これにより、企業や研究者はゼロから開発する必要がなく、迅速に研究開発を進めることができるのです。
このフレームワークは、複数のシミュレーターとロボットの実機を共通のインターフェースで扱えるため、異なる手法を同一条件下で比較し検証できる利点があります。モジュール化された設計により、ユーザーは簡単な操作でデータを入れ、学習モデルを訓練し、結果を評価することが可能です。
未来への展望
産総研では、このデータセットとフレームワークを洗練させ続け、今後はより多様で複雑な作業を対応できるようにします。加えて、視覚、言語、動作を統合したロボット基盤モデルの開発を目指し、AI開発初心者でも手軽にロボットを利用できる社会の実現に貢献することを目指しています。
この取り組みが成功すれば、製造業や物流、介護分野でのロボット利用が広がり、人手不足の解消に大きく寄与することが期待されます。興味ある方は、以下のリンクからデータセットおよびフレームワークをダウンロードして、新しいロボット開発の波に触れてみてはいかがでしょうか?


トピックス(その他)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。